Authored by Tony Feng
Created on Oct 30th, 2022
Last Modified on Nov 21st, 2022
Intro
This sereis of posts contains notes from the course Self-Driving Fundamentals: Featuring Apollo published by Udacity & Baidu Apollo. This course aims to deliver key parts of self-driving cars, including HD Map, localization, perception, prediction, planning and control. I posted these “notes” (what I’ve learnt) for study and review only.
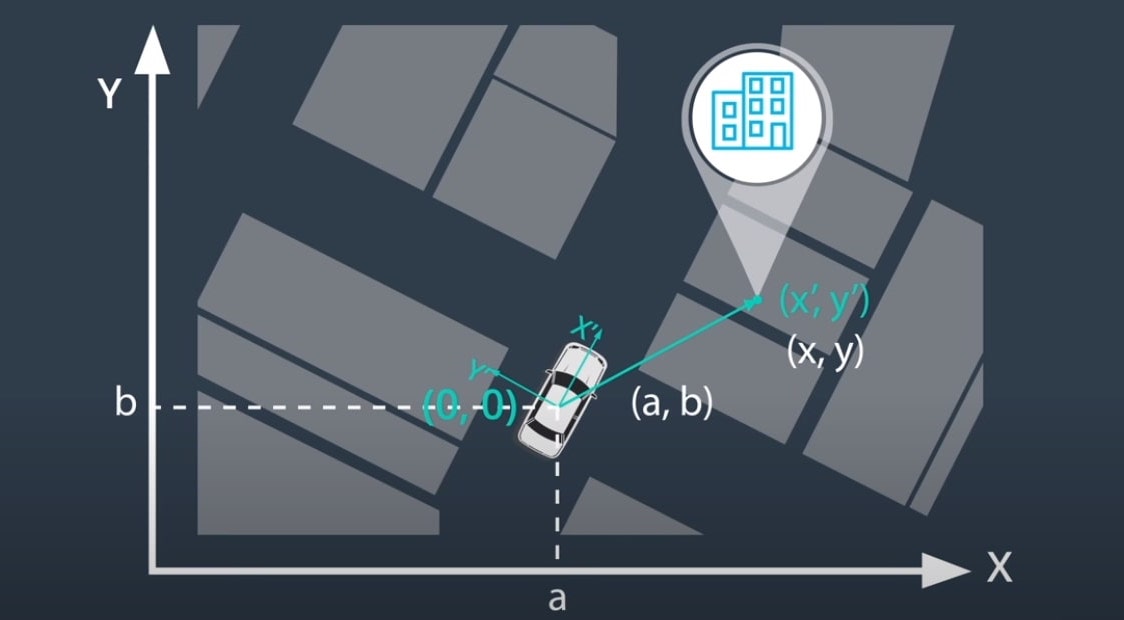
Intro to Localization
- It makes the car know where it is.
- It compares the data observed from vehicle sensors and the data on the HD map to match its position.
- Vehicle coordinate frame $\Longleftrightarrow$ data transformation $\Longleftrightarrow$ map coordinate frame

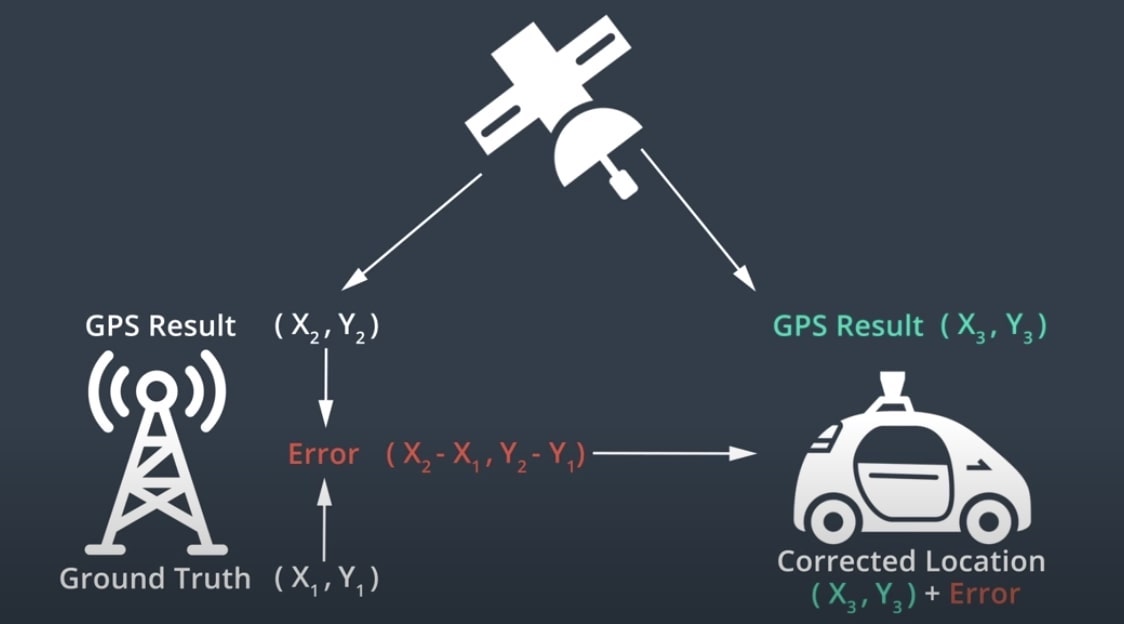
GNSS RTK
A GPS receiver capable of Real-time kinematic positioning (RTK) takes in the normal signals from the Global Navigation Satellite Systems (GNSS) along with a correction stream to achieve centimeter-level positional accuracy.
Triangulation
Triangulation is a method for calculating a position that relies on a known distance between two measuring apparatuses and the measured angles from those two points to an object. This works using the angle-side-angle triangle congruency theorem to the find the location of an object.
Trilateration
Trilateration is the more common method for position calculations. Trilateration uses the known distance from at least three fixed points in 2D space or four fixed points in 3D space (as if on the surface of the Earth) to calculate the position of an object. Trilateration works by finding the intersection of a series of circles (imagine in a Venn diagram).
Global Positioning System (GPS)
Components
- Satellite
- Control Stations
- It keeps the system running and verify the accuracy of the signals.
- GPS receiver
- It exists in mobile phones, computers, cars, etc.
- It shoud be able to detect >= 4 GPS satellites at one under appropriate environment.
- It uses time of fight (ToF) to measure the distance.
Pros & Cons
- Accurate with RTK
- Poor performance in urban area and canyons
- Low frequency update
Inertial Navigation
Basic Idea
Acceleration, initial velocity, initial position could be used to calculate the velocity and location of the car.
Inertial Measurement Unit (IMU)
Components
- Accelerometer
- Gyroscope
Pros & Cons
- High frequncy update $\rightarrow$ Real-time Location Info
- Motion error increases with time
LiDAR Localization
Point Cloud Matching
- Errors produced when matching point cloud measurement with HD map
- The # of points collected by LiDAR
- Moving objects, such as cars, pedestrians, etc.
- The transformation of point cloud measurement
- Error produced by LiDAR itself
- Iterative Closest Point Algorithms
- Filter Algorithms
- Histogram filter
- Kalman filter
Pros & Cons
- Robustness
- Maintaining up-to-date HD maps
Visual Localization
Visual Data
- Usually we combine camera data with a map and GPS
- Partical Filter Algorithms
- Observations
- Probability
- Map
Pros & Cons
- Camera data is easy to obtain
- Lack of 3D Info
- Reliance on 3D maps
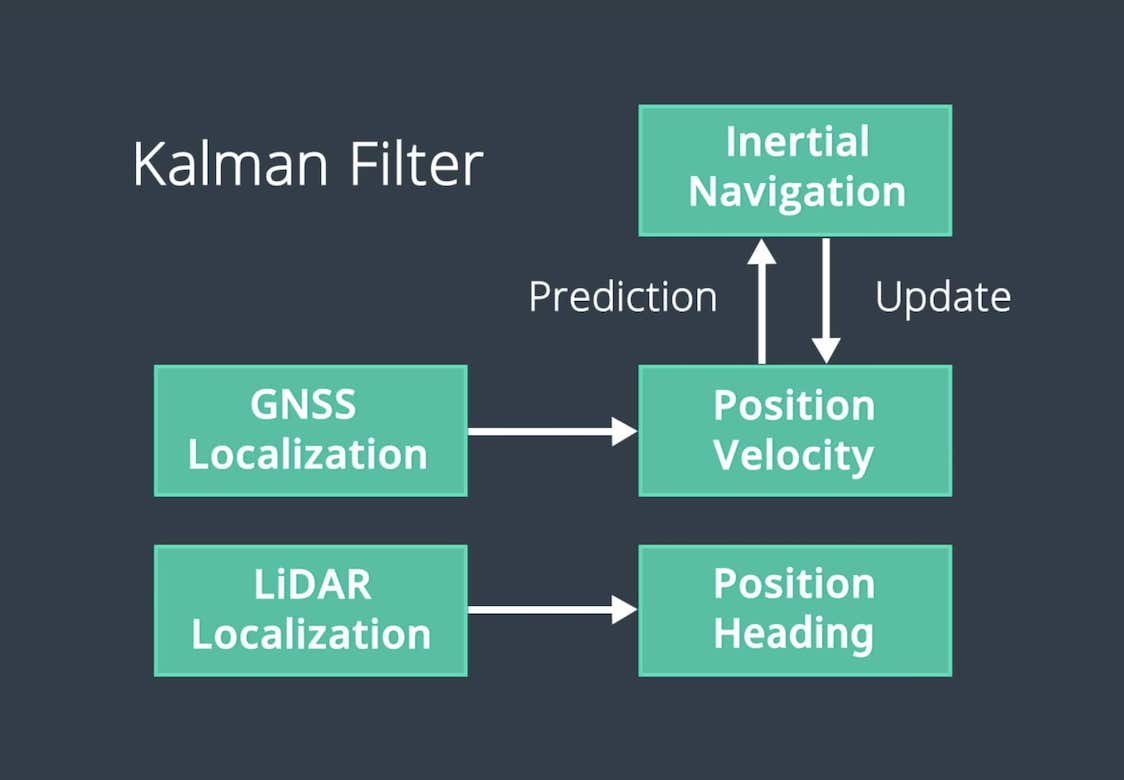
Apollo Localization
Multi-sensor Fusion
- GPS
- IMU
- LiDAR
- Radar
- HD Maps
Kalman Filter