Authored by Tony Feng
Created on Nov. 22th, 2022
Last Modified on Nov. 22th, 2022
Intro
This sereis of posts contains notes from the course Self-Driving Fundamentals: Featuring Apollo published by Udacity & Baidu Apollo. This course aims to deliver key parts of self-driving cars, including HD Map, localization, perception, prediction, planning and control. I posted these “notes” (what I’ve learnt) for study and review only.
Computer Vision for AD
Detection
Applications
- Find all pedestrians in the driving record image.
- Localize the position of the traffic light in an image.
Alogorithm
Classification
Applications
- Determine if the obstacle in a picture is a pedestrian or a biker.
- Recognize the status of a traffic light.

Tracking
Applications
- Mark a dangerously driven vehicle on the road.
- Differentiating multiple cars on the road in a sequence of continuous driving record frames.
Why tracking?
- Tracking handles occlusion.
- Tracking preserves identity.
- Tracking could be combined with a predictive algorithm to predict the future behavior of a vehicle.
Segmentation
Applications
- Determine which pixels in the image captured by the camera correspond to the travelable area.
- Distinguish lanes and road signs in driving record images
Alogorithm

Camera Images & LiDAR Images
Camera Images
- Width * Height * Depth
- Pixel $\leftarrow$ (R, G, B)
LiDAR Images
- LiDAR Pulses $\leftarrow$ Point Cloud Representation
- Shape and Surface Texture
- Spatial Info
Appllo Perception
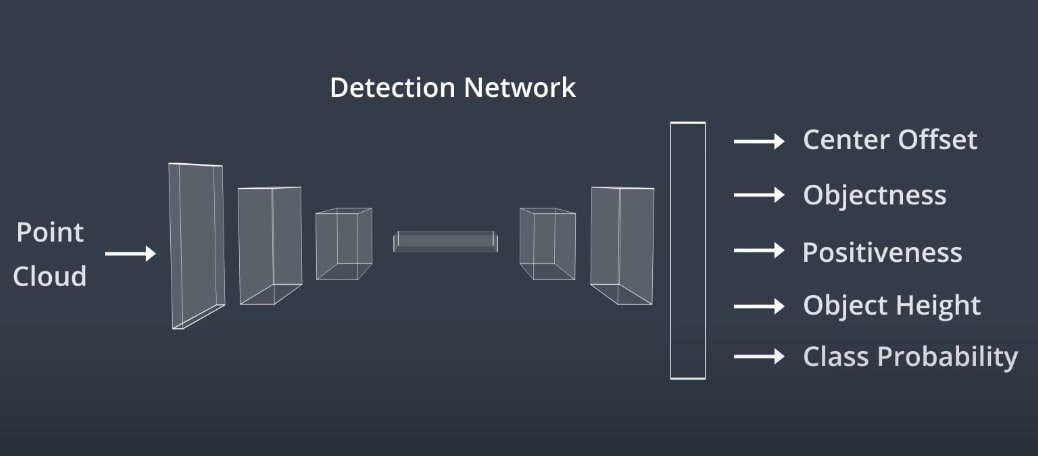
Obstacle Perceptioin
- ROI Filtering
- 3D Object Detection
- Detection to Track Association
Traffic Lights Detection
- HD Map $\leftarrow$ Location of the light
- Detection & Classification
- Matching multiple lights with lane lines
Sensor Data Comparisons
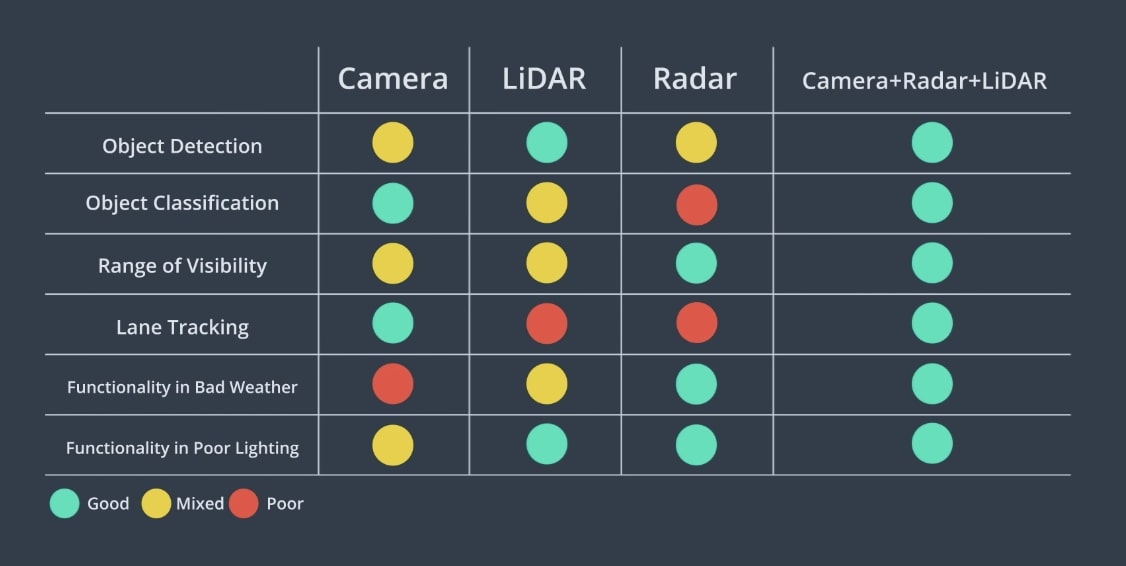
Radar
- Wavelength in mm
- Can sense non-line of sight objects
- Can currently directly measure velocity
- Low Resolution
LiRAR
- Wavelength in infrared
- Higher Resolution
- Most affected by dirt and small debris
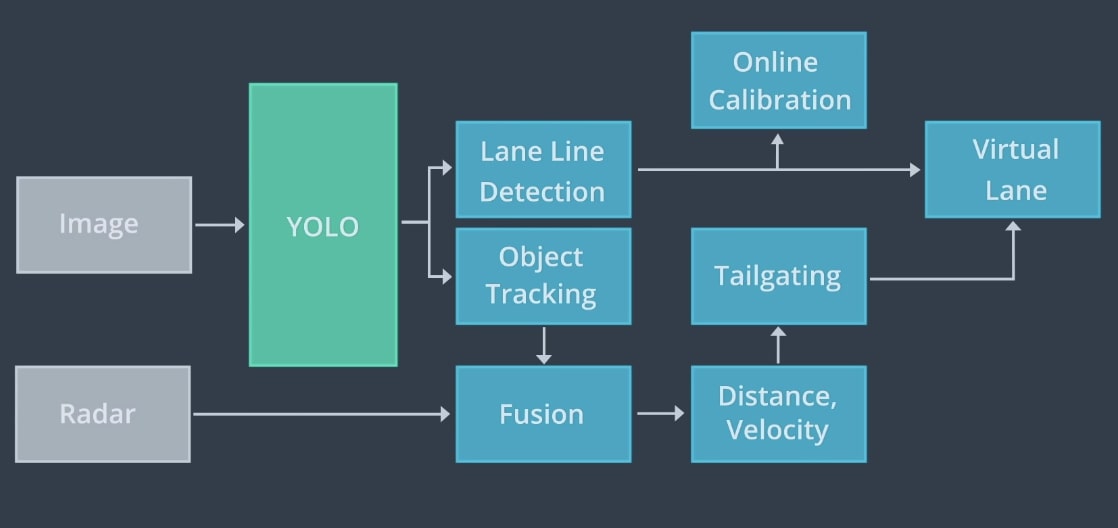
Perception Fusion Strategy